“導航線自動識別”
讓農機避免壓苗
由于水稻是按列種植的,列與列之間近似互為平行,因此,實現農機視覺自動導航的基礎在于實時準確地檢測出秧苗列中心線。
雖然使用傳統算法,水稻秧苗列間也基本能保持平行,但是不同天氣不同時段圖像亮度的差異、水田里夾雜浮萍藍藻等與秧苗特征相似的植物、偶發缺苗等干擾因素還是對傳統算法的魯棒性形成了很大的挑戰,精準度難以保證。
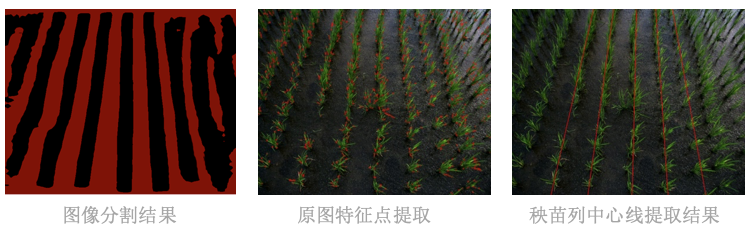
為了解決這一難題,蘇州博田技術人員綜合分析稻田圖像特點,基于百度飛槳深度學習平臺研發了水田導航線自動檢測系統。他們應用飛槳圖像分割開發套件PaddleSeg中的ICNet模型將秧苗按列從背景中分割出來,并以此為基礎實現了秧苗列中心線的精準提取,準確率能達到95%以上,處理每幀圖像耗費的時間僅300ms左右(包括ICNet網絡的分割預測時間和后續導航線提取的時間),完全滿足農機作業環境下的速度要求。
自動檢測系統配上GPS,蘇州博田農業機器人已經實現從出庫到入庫全程自動導航的無人化作業,大大減少了人力物力的投入,為農民的耕作效率、健康等提供了保障。
為什么選PaddleSeg
語義分割庫?
農機視覺導航任務與自動駕駛有一定的相似性,都需要保證一定精度的情況下有高實時性,并且能夠在嵌入式設備等移動端部署。
飛槳PaddleSeg語義分割庫的語義分割網絡之一ICNet,屬于參數量小的輕量級語義分割網絡,為自動駕駛等需要低內存和高實時性的應用場景而設計,非常適合農機視覺導航。與HRNet系列、DeepLab系列等預測精高的網絡相比,ICNet在精度降低較少的情況下大幅度減少了預測時間和占用內存,能夠在像1024*2048像素這樣高分辨率的圖像上達到實時效果。
利用PaddleSeg,蘇州博田農業機器人已經擁有排除干擾精確地將秧苗從背景中分割出來、提取外輪廓和原圖特征點、進而準確提取到中間4~5列秧苗中心線的能力,為實現農機視覺導航打下了堅實的基礎。
PaddleSeg模型訓練過程可以參考:https://github.com/PaddlePaddle/PaddleSeg/blob/release/v2.0.0-rc/README_CN.md
智能農業時代已來
百度飛槳與蘇州博田的合作,為自動導航農業機器人提供了精準、高效、可靠的技術支持,讓農機智能化、農民職業化的偉大愿景邁出了重要的一大步,為我國精細農業的推廣起到了促進作用。
此外,百度飛槳還將攜手蘇州博田,在溫室環境下果蔬采摘、智能巡檢等設施農業機器人方面展開合作。希望未來可以讓更多的農業從業者能實實在在地感受到智能農業帶來的便利。



